การจับคู่ที่เหมาะสมระหว่างอินเวอร์เตอร์โซลาร์เซลล์และระบบจัดการแบตเตอรี่ (BMS) เป็นข้อกำหนดเบื้องต้นสำหรับการทำงานที่เสถียรของระบบจัดเก็บพลังงานใดๆ
ในทางปฏิบัติ อุปสรรคการจับคู่ที่พบบ่อยที่สุดสองประการ—ระดับแรงดันไฟฟ้าที่ไม่สอดคล้องกันและโปรโตคอลการสื่อสารที่ไม่เข้ากัน—มักส่งผลให้การชาร์จ/คายประจุแบตเตอรี่ไม่ถูกต้อง ฟังก์ชันการป้องกันล้มเหลว หรือแม้แต่ความเสียหายของอุปกรณ์
บทความนี้จะกล่าวถึงหลักการ ขั้นตอน และวิธีแก้ไขปัญหาการจับคู่อินเวอร์เตอร์โซลาร์เซลล์และ BMS อย่างเป็นระบบจากสองมุมมองหลัก ได้แก่ การจับคู่แรงดันไฟฟ้าและความเข้ากันได้ของโปรโตคอลการสื่อสาร
- พื้นฐานการจับคู่แรงดันไฟฟ้า
- การจับคู่โปรโตคอลการสื่อสาร
- ความเข้ากันได้ของโปรโตคอลการสื่อสาร BMS ของอินเวอร์เตอร์ PowMr
พื้นฐานการจับคู่แรงดันไฟฟ้า
ในกระบวนการจับคู่อินเวอร์เตอร์โซลาร์เซลล์กับระบบจัดการแบตเตอรี่ (BMS) แรงดันไฟฟ้าเป็นพารามิเตอร์พื้นฐานและสำคัญที่สุด ไม่ว่าคุณจะใช้แบตเตอรี่ลิเธียม แบตเตอรี่ตะกั่วกรด หรือแบตเตอรี่ LiFePO4 อินเวอร์เตอร์ต้องทำงานภายในช่วงแรงดันไฟฟ้าที่ออกแบบไว้สำหรับแบตเตอรี่เพื่อให้มั่นใจในประสิทธิภาพที่ปลอดภัยและเชื่อถือได้
การจับคู่ช่วงแรงดันไฟฟ้า
ในการใช้งาน แรงดันไฟฟ้าของแบตเตอรี่ไม่คงที่ มันเปลี่ยนแปลงอย่างต่อเนื่องขึ้นอยู่กับสถานะการชาร์จ สภาพอุณหภูมิ และการเสื่อมสภาพของแบตเตอรี่ อินเวอร์เตอร์ต้องสามารถจัดการกับความผันผวนเหล่านี้เพื่อให้การชาร์จและคายประจุเป็นไปอย่างเสถียรและปลอดภัย ข้อควรพิจารณาหลักได้แก่:
- ความทนทานต่อแรงดันไฟฟ้า: อินเวอร์เตอร์ต้องสามารถรองรับช่วงการเปลี่ยนแปลงแรงดันไฟฟ้าทั้งหมดของแบตเตอรี่เพื่อหลีกเลี่ยงการเปิดใช้งานการป้องกันบ่อยครั้ง
- การตอบสนองแบบไดนามิก: ในระหว่างการชาร์จและคายประจุ อาจเกิดแรงดันไฟฟ้าชั่วคราวที่สูงหรือต่ำกว่าปกติ และอินเวอร์เตอร์ต้องตอบสนองอย่างรวดเร็วด้วยกลไกควบคุมและป้องกันที่เหมาะสม
- ความปลอดภัยของระบบ: หากแรงดันไฟฟ้าอยู่นอกช่วงที่อินเวอร์เตอร์ยอมรับได้เป็นเวลานาน อาจส่งผลต่อประสิทธิภาพหรือทำให้เกิดการปิดระบบป้องกัน
หากแรงดันไฟฟ้าของแบตเตอรี่เกินช่วงที่อินเวอร์เตอร์ยอมรับได้ในระหว่างการชาร์จหรือคายประจุ อาจเกิดปัญหาหลายประการได้:
- การเปิดใช้งานการป้องกันแรงดันไฟฟ้าเกิน (OVP)
- การเปิดใช้งานการปิดเครื่องแรงดันต่ำ (LVD)
- การรีสตาร์ทอินเวอร์เตอร์ซ้ำหรือการรีบูตระบบซ้ำๆ
ดังนั้น เมื่อจับคู่ระบบอินเวอร์เตอร์และแบตเตอรี่ จำเป็นต้องตรวจสอบทั้งสองอย่าง:
- ไม่ว่าค่าระบุแรงดันไฟฟ้าจะเข้ากันได้หรือไม่
ไม่ว่าช่วงแรงดันไฟฟ้าจริงที่ใช้งานจะทับซ้อนกันตลอดรอบการชาร์จและการคายประจุหรือไม่ - การรับรองความเข้ากันได้ของช่วงแรงดันไฟฟ้าที่เหมาะสมช่วยรักษาการทำงานที่เสถียร ป้องกันเหตุการณ์การป้องกันที่ไม่จำเป็น และปรับปรุงความน่าเชื่อถือและอายุการใช้งานโดยรวมของระบบจัดเก็บพลังงาน
ผลกระทบของการกำหนดค่าแบบอนุกรม/ขนานต่อแรงดันไฟฟ้ารวม
การเชื่อมต่อแบบอนุกรมเป็นวิธีเดียวในการเพิ่มแรงดันไฟฟ้าของชุดแบตเตอรี่ ซึ่งเป็นตัวกำหนดโดยตรงสำหรับพารามิเตอร์ "จำนวนอนุกรม" ของ BMS และการจับคู่แรงดันไฟฟ้าระบบอินเวอร์เตอร์โซลาร์เซลล์
ช่วงแรงดันไฟฟ้า
| จำนวนอนุกรม | แรงดันปกติ (LiFePO₄ 3.2V) | แรงดันชาร์จเต็ม | แรงดันตัด | อินเวอร์เตอร์ที่เข้ากันได้ | จำนวนอนุกรมของ BMS |
|---|---|---|---|---|---|
| 4S (4 อนุกรม) | 12.8V | 14.6V | 10.0V | อินเวอร์เตอร์ 12V | 4S |
| 8S (8 อนุกรม) | 25.6V | 29.2V | 20.0V | อินเวอร์เตอร์ 24V | 8S |
| 16S (16 อนุกรม) | 51.2V | 58.4V | 40.0V | อินเวอร์เตอร์ 48V | 16S |
| 32S (32 อนุกรม) | 102.4V | 116.8V | 80.0V | อินเวอร์เตอร์แรงดันสูง | 32S |
หลักการจับคู่ BMS หลัก:
- จำนวนช่องการสุ่มตัวอย่างแรงดันไฟฟ้าของ BMS ต้องเท่ากับจำนวนเซลล์ที่เชื่อมต่อแบบอนุกรมจริง
- เซลล์แต่ละเซลล์ในอนุกรมสอดคล้องกับจุดตรวจจับแรงดันไฟฟ้าเซลล์เดี่ยวบน BMS
- จำนวนอนุกรมไม่ถูกต้อง = การสุ่มตัวอย่างแรงดันไฟฟ้าไม่ตรงกัน → เกณฑ์การป้องกันทั้งหมดเปลี่ยนแปลง → ความเสี่ยงการชาร์จเกิน/คายประจุเกิน
สถานการณ์ข้อผิดพลาดทั่วไป:
- การใช้ BMS แบบ 7S เพื่อจัดการชุดแบตเตอรี่ 8S จะทำให้เซลล์หนึ่งเซลล์ไม่ได้รับการตรวจสอบ ซึ่งเป็นความเสี่ยงด้านความปลอดภัยอย่างรุนแรง เนื่องจากเซลล์ที่ไม่ได้รับการตรวจสอบอาจเกิดแรงดันเกินขณะชาร์จและเกิดความไม่สมดุลเมื่อเวลาผ่านไป อาจนำไปสู่ความเสียหายหรือการบวมของเซลล์
- การใช้ BMS แบบ 9S เพื่อจัดการชุดแบตเตอรี่ 8S อาจทำให้เกิดความไม่ตรงกันของการกำหนดค่าระบบ ขึ้นอยู่กับการออกแบบของ BMS ช่องที่ไม่ได้ใช้อาจทำให้เกิดการอ่านแรงดันไฟฟ้าที่ผิดปกติ การประเมินสถานะการชาร์จผิดพลาด หรือการแจ้งเตือนข้อผิดพลาด เช่น ข้อผิดพลาดการเดินสายหรือสัญญาณเตือนความไม่สมดุลของแรงดันเซลล์
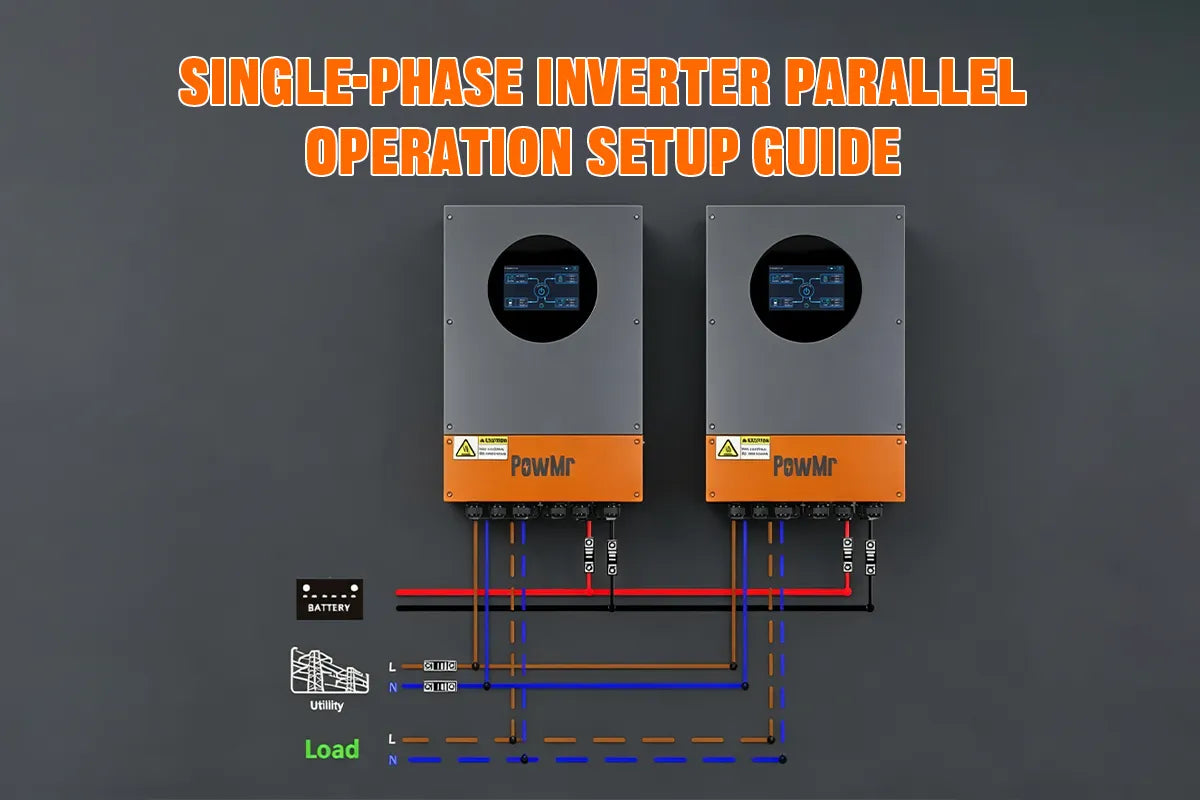
การกำหนดค่าขนาน
การเชื่อมต่อแบบขนานเพิ่มความจุของชุดแบตเตอรี่และกระแสสูงสุดโดยไม่เปลี่ยนแรงดันไฟฟ้ารวม ดังนั้นจำนวนอนุกรมของ BMS จะไม่เปลี่ยนแปลง แต่ต้องเพิ่มการจัดอันดับกระแส
| การกำหนดค่าขนาน | การเปลี่ยนแปลงความจุ | การเปลี่ยนแปลงกระแส | ข้อกำหนดการจัดอันดับกระแสของ BMS |
|---|---|---|---|
| 1P (ชุดเดียว) | 100Ah | 100A | 100A ต่อเนื่อง |
| 2P (สองชุดขนาน) | 200Ah | 200A | 200A ต่อเนื่อง |
| 3P (สามชุดขนาน) | 300Ah | 300A | 300A ต่อเนื่อง |
| 4P (สี่ชุดขนาน) | 400Ah | 400A | 400A ต่อเนื่อง |
การจับคู่โปรโตคอลการสื่อสาร
- การปรับการชาร์จแบบไดนามิก: อินเวอร์เตอร์สามารถปรับพารามิเตอร์การชาร์จแบบเรียลไทม์ตามสถานะของแบตเตอรี่ (SOC, SOH, อุณหภูมิ, แรงดันเซลล์แต่ละเซลล์)
- การควบคุมความปลอดภัยสองทิศทาง: BMS สามารถสั่งให้อินเวอร์เตอร์หยุดการชาร์จหรือการคายประจุเมื่อถึงเกณฑ์วิกฤต
- การป้องกันความขัดแย้ง: การป้องกันที่ประสานงานกันช่วยป้องกันสถานการณ์ที่อินเวอร์เตอร์ดันกระแสสูงในขณะที่ BMS พยายามปรับสมดุลเซลล์อยู่
- การตรวจจับความผิดปกติที่ดีขึ้น: การตรวจสอบด้วยระบบคู่ช่วยลดความเสี่ยงของความผิดปกติที่ไม่ถูกตรวจพบเนื่องจากแต่ละระบบคิดว่าอีกฝ่ายกำลังจัดการการป้องกันอยู่
หากไม่มีการจับคู่โปรโตคอล อินเวอร์เตอร์จะทำงานใน “โหมดตาบอด” — พึ่งพาเซ็นเซอร์แรงดันและกระแสของตัวเองเพื่อประเมินสถานะแบตเตอรี่เท่านั้น ซึ่งส่งผลให้เกิด:
- ความขัดแย้งในการชาร์จ: อินเวอร์เตอร์ยังคงชาร์จด้วยกระแสสูงในขณะที่ BMS พยายามปรับสมดุลเซลล์
- การปิดเครื่องก่อนเวลา: เกณฑ์แรงดันไฟฟ้าที่ไม่ตรงกันทำให้เกิดการหยุดป้องกันโดยไม่จำเป็น
- ช่องว่างในการป้องกัน: สถานการณ์ที่เลวร้ายที่สุดที่ทั้งสองระบบไม่สามารถตรวจจับความผิดปกติได้เพราะแต่ละระบบคิดว่าอีกฝ่ายกำลังจัดการอยู่
- อายุแบตเตอรี่ลดลง: โปรไฟล์การชาร์จที่ไม่ได้ปรับให้เหมาะสมเร่งการเสื่อมสภาพของเซลล์
ความเข้ากันได้ของโปรโตคอลการสื่อสาร BMS ของอินเวอร์เตอร์ PowMr
โปรโตคอลการสื่อสารที่รองรับด้านล่างนี้อ้างอิงจากเวอร์ชันเฟิร์มแวร์ปัจจุบัน ความพร้อมใช้งานของโปรโตคอลจริงอาจแตกต่างกันไปตามการแก้ไขเฟิร์มแวร์ รุ่นตามภูมิภาค หรือการอัปเดตซอฟต์แวร์ในอนาคต โปรดตรวจสอบความเข้ากันได้กับคู่มือผู้ใช้ล่าสุดก่อนติดตั้งเสมอ
| รุ่น | พอร์ต BMS | โปรโตคอลที่รองรับ | โมดูล Wifi |
|---|---|---|---|
|
POW-RELAB 5KU-SPLIT POW-RELAB 10KU-SPLIT POW-HVM12KP |
BMS | PYLON, Growatt, Voltronic | WIFI-RELAB |
|
POW-SunSmart LVM12K POW-SunSmart 10KP-PRO |
RS485/CAN | PACE (PACE), RUDA (RITAR), AOGUAN (ALLGRAND), OULITE (OLITER), CEF (CFE), XINGWANGDA (SUNWODA), DAQIN (DYNESS), WOW (SRNE), PYL (PYLONTECH), MIT (FOXESS), XIX (XYE), POL (PowMr), GUOX (Gotion), SMK (SMK), VOL (WEILAN), WES (WES), SGP (SGP), GSL (GSL Energy), PYT (Pylon tech 2) | WIFI-HF-N |
| POW-SunSmart 16KP | RS485/CAN | PAC (PACE), RDA (RITAR), AOG (ALLGRAND), OLT (OLITER), CEF (CFE), XWD (SUNWODA), DAQ (DYNESS), WOW (SRNE), PYL (PYLONTECH), POW (PowMr), VOL (VILION), SGP (SGP), GSL (GSL Energy), PYT (Pylon tech 2) |
|
| POW-SunSmart SP5.2K | RS485 | PAC (PACE), RDA (RITAR), AOG (ALLGRAND), OLT (OLITER), HWD (SUNWODA), DAQ (DYNESS), WOW (SRNE), PYL (PYLONTECH), UOL (WEILAN) | WIFI-HF-N |
| POW-LVM3K-24V-H | RS485 | PAC (PACE), RDA (Ruida), AOG (Aoguan), OLT (Oliter), HWD (Sunwoda), DAQ (Daqin), WOW (SRNE), PYL (Pylontech), UOL (Vilion) | WIFI-HF-N |
| POW-LVM3.6M-24V | RS485 | LIC (PACE 232), LIP (PACE 485), LIL (PYLON 485) | ECO/MAX-730 |
| POW-LVM3.2K-24V | RS485 | PAC (PACE), RDA (Ruida), AOG (Aoguan), OLT (Oliter), XWD (Sunwoda), DAQ (Daqin), WOW (SRNE), PYL (Pylontech), SHO (FOX ESS), POW (PowMr) | WIFI-HF-N |
| POW-HVM4.2K-24V-D | RS485 | PYL (PYLONTECH), PAC (PACE) | - |
|
POW-ECO-3KW POW-ECO-6KW |
BMS | PACE_485, PYLON_485 |
|
| POW-HVM6.5KP | BMS | PYL (Pylontech), GRO (Growatt), TQF (Techfine), FEL (Felicity) | WIFI-RELAB |

{kind=link}