Правильний підбір сонячного інвертора та системи управління акумулятором (BMS) є передумовою стабільної роботи будь-якої системи зберігання енергії.
На практиці дві найпоширеніші проблеми підбору — невідповідність рівнів напруги та несумісність протоколів зв’язку — часто призводять до неправильного заряджання/розряджання акумулятора, відмови захисних функцій або навіть пошкодження обладнання.
У цій статті систематично розглядаються принципи, процедури та методи усунення несправностей при підборі сонячного інвертора та BMS з двох основних аспектів: відповідність напруги та сумісність протоколів зв’язку.
- Основи відповідності напруги
- Відповідність протоколів зв’язку
- Сумісність протоколів зв’язку BMS інвертора PowMr
Основи відповідності напруги
Під час підбору сонячного інвертора з системою управління акумулятором (BMS) напруга є найфундаментальнішим і найважливішим параметром. Незалежно від того, чи використовуєте ви літій-іонні, свинцево-кислотні або LiFePO4 акумулятори, інвертор повинен працювати в межах свого проєктного діапазону напруги акумулятора для забезпечення безпечної та надійної роботи.
Відповідність діапазонів напруги
Під час роботи напруга акумулятора не є фіксованою. Вона постійно коливається залежно від стану заряду, температурних умов і старіння акумулятора. Інвертор повинен вміти справлятися з цими варіаціями, щоб забезпечити стабільну та безпечну роботу при заряджанні та розряджанні. Основні аспекти включають:
- Допуск напруги: інвертор повинен покривати повний діапазон коливань робочої напруги акумулятора, щоб уникнути частих спрацьовувань захисту.
- Динамічна реакція: під час заряджання та розряджання можуть виникати перехідні стрибки або падіння напруги, і інвертор повинен швидко реагувати відповідними механізмами керування та захисту.
- Безпека системи: якщо напруга тривалий час залишається поза допустимим діапазоном інвертора, це може вплинути на продуктивність або спричинити захисне відключення.
Якщо напруга акумулятора перевищує допустимий діапазон інвертора під час заряджання або розряджання, можуть виникнути кілька проблем:
- Активація захисту від перенапруги (OVP)
- Активація захисту від низької напруги (LVD)
- Повторні перезапуски інвертора або цикли перезавантаження системи
Тому при підборі інвертора та акумуляторної системи важливо перевірити обидва параметри:
- Чи сумісні номінальні напруги
Чи перекриваються фактичні діапазони робочої напруги протягом циклу заряджання та розряджання - Забезпечення сумісності з правильним діапазоном напруги допомагає підтримувати стабільну роботу, запобігає непотрібним захисним відключенням і покращує загальну надійність та термін служби системи зберігання енергії.
Вплив послідовних/паралельних конфігурацій на загальну напругу
Послідовне з’єднання — єдиний спосіб збільшити напругу акумуляторного пакета, що безпосередньо визначає параметр «кількість послідовних елементів» BMS і відповідність напруги системи сонячного інвертора.
Діапазон напруги.
| Кількість послідовних елементів | Номінальна напруга (LiFePO₄ 3,2В) | Напруга повного заряду | Напруга відключення | Сумісний інвертор | Кількість послідовних елементів BMS |
|---|---|---|---|---|---|
| 4S (4 послідовних елементи) | 12,8В | 14,6В | 10,0В | Інвертор 12В | 4S |
| 8S (8 послідовних елементів) | 25,6В | 29,2В | 20,0В | Інвертор 24В | 8S |
| 16S (16 послідовних елементів) | 51,2В | 58,4В | 40,0В | Інвертор 48В | 16S |
| 32S (32 послідовних елементи) | 102,4В | 116,8В | 80,0В | Інвертор високої напруги | 32S |
Основний принцип відповідності BMS:
- Кількість каналів вимірювання напруги BMS має дорівнювати фактичній кількості послідовно з’єднаних елементів
- Кожен послідовний елемент відповідає одній точці вимірювання напруги окремого елемента на BMS
- Неправильна кількість послідовних елементів = невідповідність зразків напруги → зсув усіх порогів захисту → ризики перезаряджання/перерозряджання
Типові сценарії помилок:
- Використання BMS 7S для керування акумулятором 8S призводить до того, що один елемент не контролюється. Це створює серйозний ризик безпеки, оскільки неконтрольований елемент може зазнати перенапруги під час заряджання і з часом стати дисбалансованим, що потенційно призведе до пошкодження або набряку елемента.
- Використання BMS 9S для керування акумулятором 8S може спричинити невідповідність конфігурації системи. Залежно від конструкції BMS, невикористані канали можуть призводити до аномальних показань напруги, неправильного оцінювання стану заряду або попереджень про несправності, таких як помилки підключення або тривоги про дисбаланс напруги елементів.
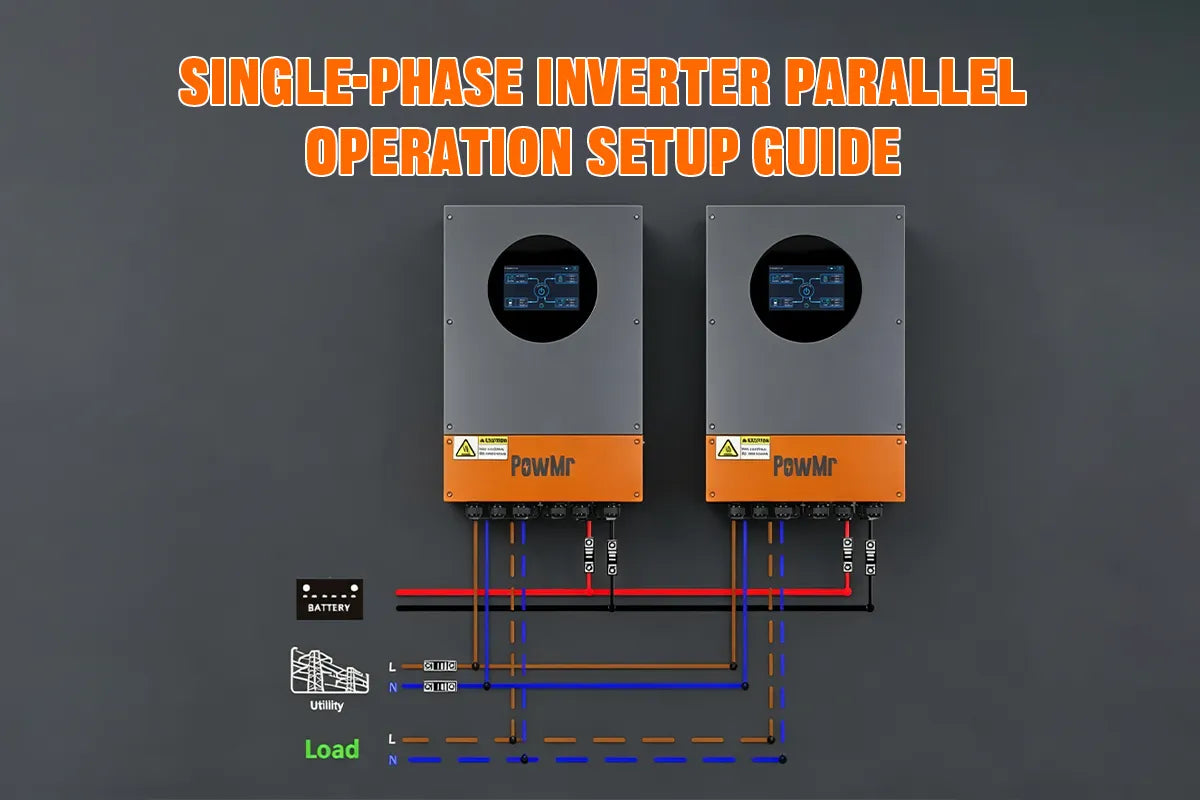
Паралельна конфігурація
Паралельне з’єднання збільшує ємність акумуляторного пакета та максимальний струм без зміни загальної напруги. Тому кількість послідовних елементів BMS залишається незмінною, але номінал струму потрібно підвищити.
| Паралельна конфігурація | Зміна ємності | Зміна струму | Вимоги до номіналу струму BMS |
|---|---|---|---|
| 1P (один пакет) | 100А·год | 100A | 100А безперервно |
| 2P (два пакети паралельно) | 200А·год | 200A | 200А безперервно |
| 3P (три пакети паралельно) | 300А·год | 300A | 300А безперервно |
| 4P (чотири пакети паралельно) | 400А·год | 400A | 400А безперервно |
Відповідність протоколів зв’язку
- Динамічне регулювання заряджання: інвертор може в режимі реального часу коригувати параметри заряджання залежно від стану акумулятора (SOC, SOH, температура, напруга окремих елементів)
- Двонапрямний контроль безпеки: BMS може наказати інвертору припинити заряджання або розряджання при досягненні критичних порогів
- Запобігання конфліктам: скоординований захист запобігає ситуаціям, коли інвертор подає великий струм, а BMS намагається балансувати елементи батареї
- Покращеного виявлення несправностей: подвійний моніторинг систем знижує ризик пропущених несправностей через припущення кожної системи, що інша контролює захист
Без узгодження протоколів інвертор працює в «режимі сліпого управління» — покладаючись виключно на власні датчики напруги та струму для оцінки стану акумулятора. Це призводить до:
- Конфлікти заряджання: інвертор продовжує заряджати великим струмом, поки BMS намагається балансувати елементи
- Передчасне вимкнення: невідповідність порогів напруги викликає непотрібні зупинки захисту
- Прогалини в захисті: найгірші сценарії, коли обидві системи не виявляють несправність, бо кожна вважає, що інша її контролює
- Скорочений термін служби акумулятора: неоптимізовані профілі заряджання прискорюють деградацію елементів
Сумісність протоколів зв’язку BMS інвертора PowMr
Підтримувані протоколи зв’язку, наведені нижче, базуються на поточних версіях прошивки. Фактична доступність протоколів може відрізнятися залежно від версії прошивки, регіональної моделі або майбутніх оновлень програмного забезпечення. Завжди перевіряйте сумісність з останнім посібником користувача перед встановленням.
| Модель | Порт BMS | Підтримувані протоколи | Wi-Fi модуль |
|---|---|---|---|
|
POW-RELAB 5KU-SPLIT POW-RELAB 10KU-SPLIT POW-HVM12KP |
BMS | PYLON, Growatt, Voltronic | WIFI-RELAB |
|
POW-SunSmart LVM12K POW-SunSmart 10KP-PRO |
RS485/CAN | PACE (PACE), RUDA (RITAR), AOGUAN (ALLGRAND), OULITE (OLITER), CEF (CFE), XINGWANGDA (SUNWODA), DAQIN (DYNESS), WOW (SRNE), PYL (PYLONTECH), MIT (FOXESS), XIX (XYE), POL (PowMr), GUOX (Gotion), SMK (SMK), VOL (WEILAN), WES (WES), SGP (SGP), GSL (GSL Energy), PYT (Pylon tech 2) | WIFI-HF-N |
| POW-SunSmart 16KP | RS485/CAN | PAC (PACE), RDA (RITAR), AOG (ALLGRAND), OLT (OLITER), CEF (CFE), XWD (SUNWODA), DAQ (DYNESS), WOW (SRNE), PYL (PYLONTECH), POW (PowMr), VOL (VILION), SGP (SGP), GSL (GSL Energy), PYT (Pylon tech 2) |
|
| POW-SunSmart SP5.2K | RS485 | PAC (PACE), RDA (RITAR), AOG (ALLGRAND), OLT (OLITER), HWD (SUNWODA), DAQ (DYNESS), WOW (SRNE), PYL (PYLONTECH), UOL (WEILAN) | WIFI-HF-N |
| POW-LVM3K-24V-H | RS485 | PAC (PACE), RDA (Ruida), AOG (Aoguan), OLT (Oliter), HWD (Sunwoda), DAQ (Daqin), WOW (SRNE), PYL (Pylontech), UOL (Vilion) | WIFI-HF-N |
| POW-LVM3.6M-24V | RS485 | LIC (PACE 232), LIP (PACE 485), LIL (PYLON 485) | ECO/MAX-730 |
| POW-LVM3.2K-24V | RS485 | PAC (PACE), RDA (Ruida), AOG (Aoguan), OLT (Oliter), XWD (Sunwoda), DAQ (Daqin), WOW (SRNE), PYL (Pylontech), SHO (FOX ESS), POW (PowMr) | WIFI-HF-N |
| POW-HVM4.2K-24V-D | RS485 | PYL (PYLONTECH), PAC (PACE) | - |
|
POW-ECO-3KW POW-ECO-6KW |
BMS | PACE_485, PYLON_485 |
|
| POW-HVM6.5KP | BMS | PYL (Pylontech), GRO (Growatt), TQF (Techfine), FEL (Felicity) | WIFI-RELAB |

{kind=link}